ROS2 Humble 환경 세팅
Windows11 WSL2 환경이기 때문에 ROS2 Humble 공식 문서의 Ubuntu 설치 환경을 따라간다. Jazzy가 ROS2의 최신버전이지만 활용 예시 등을 참고하기에는 Humble의 검색 결과가 많이 나오기 때문.
https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.html#resources
Ubuntu (deb packages) — ROS 2 Documentation: Humble documentation
You're reading the documentation for an older, but still supported, version of ROS 2. For information on the latest version, please have a look at Kilted. Ubuntu (deb packages) Table of Contents Deb packages for ROS 2 Humble Hawksbill are currently availab
docs.ros.org
ROS2 Humble 사용을 위해서는 **Ubuntu 22.04 버전**이 필요하다.
Ubuntu 버전 확인 명령어 lsb_release -aUbuntu 22.04 버전 설치 (Powershell) wsl --install -d Ubuntu-22.04
1단계: 시스템 설정 및 저장소(Repository) 추가
1. 언어(Locale) 설정 확인 및 적용 (ROS 2는 UTF-8 인코딩 환경 필요)
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
2. Ubuntu Universe 저장소 활성화
sudo apt install software-properties-common -y
sudo add-apt-repository universe -y
3. ROS 2 GPG 키 추가 (ROS 2 패키지를 공식적으로 안전하게 다운받기 위한 인증키)
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
4. 우분투 소스 리스트에 ROS 2 저장소 추가
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
2단계: 핵심 패키지 설치
1. 패키지 리스트 업데이트 및 시스템 업그레이드
sudo apt update && sudo apt upgrade -y
2. 데스크탑 버전 설치
sudo apt install ros-humble-desktop -y
3. 개발용 툴(colcon 등) 설치
sudo apt install python3-colcon-common-extensions python3-rosdep python3-argcomplete build-essential -y
3단계: 환경 변수 세팅
설치가 완료되었더라도 터미널은 ROS 2가 어디에 설치되었는지 모르기 때문에 터미널을 열 때마다 자동으로 ROS 2를 인식하게 만들어야 한다.
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
4단계: 설치 확인
첫 번째 터미널에서 데이터를 보내고
ros2 run demo_nodes_cpp talker
두 번째 터미널에서 데이터를 받는지 본다.
ros2 run demo_nodes_py listener
* 테스트 종료는 Ctrl + C
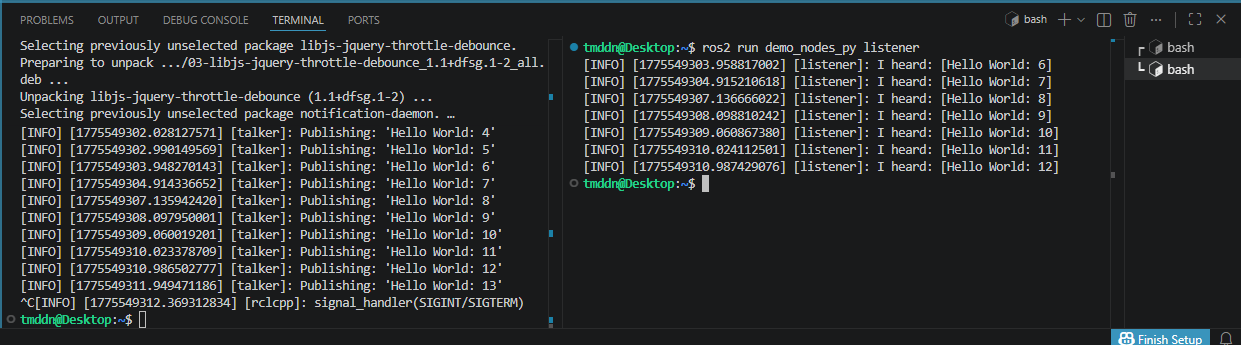
talker와 listener가 잘 작동하는 것을 확인할 수 있다.
워크스페이스 구축
개발 워크스페이스 생성
실제 소스 코드가 들어갈 src 폴더 생성
mkdir -p ~/UnrealRobotics/src
폴더로 이동
cd ~/UnrealRobotics
빈 공간이지만 한번 빌드 툴(colcon)을 돌려서 기본 구조를 세팅
colcon build
이 워크스페이스도 터미널이 인식할 수 있게 추가
echo "source ~/UnrealRobotics/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
Github에서 Repository 생성
https://github.com/Unity-SeungwooLee/UnrealRobotics-SO101
GitHub - Unity-SeungwooLee/UnrealRobotics-SO101
Contribute to Unity-SeungwooLee/UnrealRobotics-SO101 development by creating an account on GitHub.
github.com
REAME.md 추가, .gitignore는 Unreal 템플릿으로 추가했다.
생성 후 Window 로컬 폴더에 git clone
Unreal Project 생성
글을 작성하는 기준으로 현재 최신 버전은 UE5.7 버전이지만 플러그인 호환성 등의 이슈가 있을 수 있기 때문에 예전에 설치해뒀던 5.4.4 버전의 언리얼 프로젝트를 생성하기로 한다.
Blank 프로젝트, C++ 사용으로 체크한 후 clone 받은 리포지토리 로컬 폴더에 프로젝트를 생성한다.

Unreal ROS 용 Claude Code Skill과 Claude.md 생성
이번 프로젝트에 맞는 CLAUDE.md와 Skill을 생성했다.
추가로 everything-claude-code의 search-first 스킬과 strategic-compact 스킬도 가져다가 쓴다.
'Unreal Engine > 언리얼-ROS-Physical 통합 프로젝트' 카테고리의 다른 글
| [UnrealRobotics: SO-101] (6) SO-ARM-101 조립 (0) | 2026.04.15 |
|---|---|
| [UnrealRobotics: SO-101] (5) SO-ARM-101 부품 검증, 모터 연결 확인 (2) | 2026.04.10 |
| [UnrealRobotics: SO-101] (4) 언리얼 Output Log에 로그 출력 (C++ 파일 생성 및 디버깅) (0) | 2026.04.09 |
| [UnrealRobotics: SO-101] (3) Windows↔WSL2 TCP localhost 통신, rosbridge 설치 및 기동 (0) | 2026.04.08 |
| [UnrealRobotics: SO-101] (1) 프로젝트 컨셉 및 방향성 (0) | 2026.04.07 |



