728x90
반응형
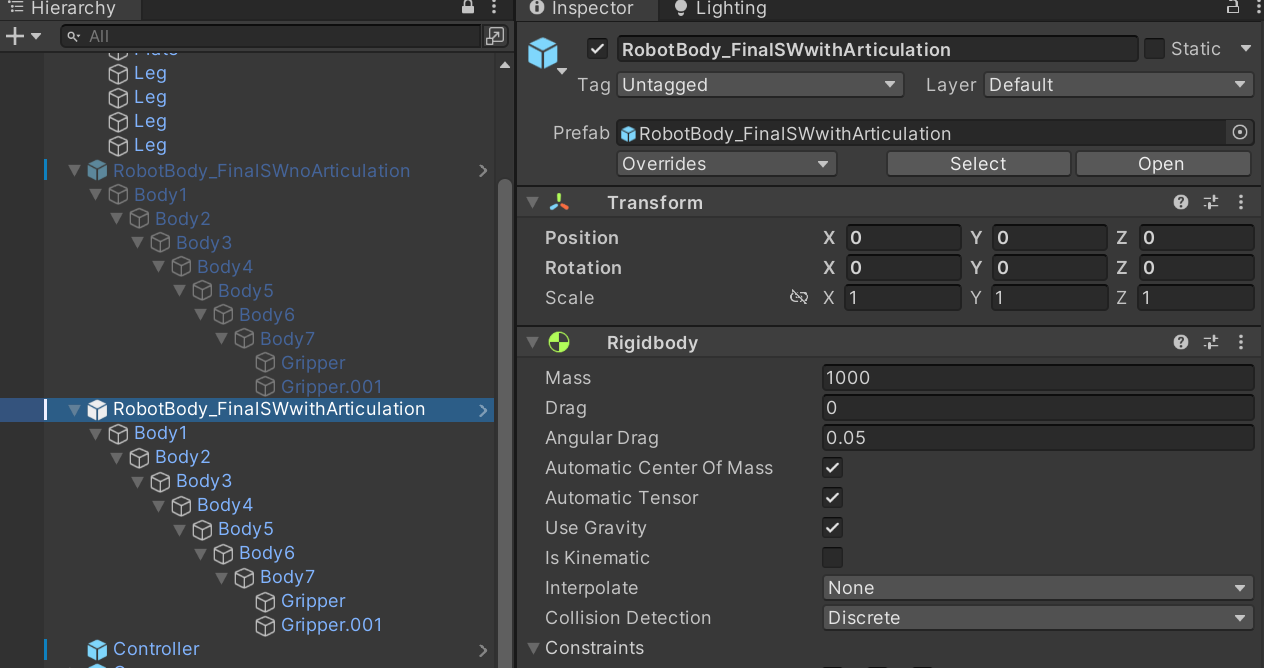
로봇 전체를 아우르는 프리팹에 Rigidbody를 넣어 물리가 작동되게 하였고, 마찬가지로 Rigidbody, collider가 들어가있는 큐브를 배치하여 그리퍼로 잡을 수 있게 하였다.
그리퍼 스크립트
using System.Collections;
using UnityEngine;
public class GripperController2 : MonoBehaviour
{
public float speed = 0.000001f;
private Vector3 startPosition;
private Vector3 endPosition;
// Start is called before the first frame update
void Start()
{
startPosition = new Vector3(0f, 0.00032f, -0.000074f);
endPosition = new Vector3(0f, 0.00032f, -0.000293f);
}
// Update is called once per frame
void Update()
{
if (Input.GetKey(KeyCode.G))
{
MoveObject(Vector3.forward); // G 키를 누르고 있을 때 지속적으로 이동
}
else if (Input.GetKey(KeyCode.H))
{
MoveObject(Vector3.back); // H 키를 누르고 있을 때 지속적으로 이동
}
}
void MoveObject(Vector3 direction)
{
float step = speed * Time.deltaTime;
transform.localPosition += direction * step;
}
}누르고있는 동안 이동, 물리 적용으로 물체와 상호작용 가능
UIManager 스크립트(spacehee 作)
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using TMPro;
public class UiManager : MonoBehaviour
{
public GameObject body2;
public GameObject body3;
public GameObject body4;
public GameObject body5;
public GameObject body6;
public GameObject body7;
//Body UI
public TextMeshProUGUI bodyTwo;
public TextMeshProUGUI bodyThree;
public TextMeshProUGUI bodyFour;
public TextMeshProUGUI bodyFive;
public TextMeshProUGUI bodySix;
public TextMeshProUGUI bodySeven;
//각도
public int bodyTwoAngle;
public int bodyThreeAngle;
public int bodyFourAngle;
public int bodyFiveAngle;
public int bodySixAngle;
public int bodySevenAngle;
// Start is called before the first frame update
void Start()
{
bodyTwo.text = "Body2 " + ((int)body2.transform.localRotation.eulerAngles.z).ToString() + "°";
bodyThree.text = "Body3 " + ((int)body3.transform.localRotation.eulerAngles.x).ToString() + "°";
bodyFour.text = "Body4 " + ((int)body4.transform.localRotation.eulerAngles.x).ToString() + "°";
bodyFive.text = "Body5 " + ((int)body5.transform.localRotation.eulerAngles.y).ToString() + "°";
bodySix.text = "Body6 " + ((int)body6.transform.localRotation.eulerAngles.x -270).ToString() + "°";
bodySeven.text = "Body7 " + ((int)body7.transform.localRotation.eulerAngles.y).ToString() + "°" ;
}
void Update()
{
//Debug.Log(body2.transform.rotation.eulerAngles);
bodyTwo.text = "Body2 " + ((int)body2.transform.localRotation.eulerAngles.z).ToString() + "°";
//Debug.Log(body3.transform.rotation.eulerAngles);
bodyThree.text = "Body3 " + ((int)body3.transform.localRotation.eulerAngles.x).ToString() +"°";
//Debug.Log(body4.transform.rotation.eulerAngles);
bodyFour.text = "Body4 " + ((int)body4.transform.localRotation.eulerAngles.x).ToString() +"°";
//Debug.Log(body5.transform.rotation.eulerAngles);
bodyFive.text = "Body5 " + ((int)body5.transform.localRotation.eulerAngles.y).ToString() +"°";
//Debug.Log(body6.transform.rotation.eulerAngles);
bodySix.text = "Body6 " + ((int)body6.transform.localRotation.eulerAngles.x -270).ToString() +"°";
//Debug.Log(body7.transform.rotation.eulerAngles);
bodySeven.text = "Body7 " + ((int)body7.transform.localRotation.eulerAngles.y).ToString() +"°";
}
}- (int)를 이용해서 소수점 아래 많은 숫자 나오는 것을 방지
- degree를 넣어서 몇 도인지 표시
- localRotation을 이용해서 글로벌 좌표 값이 아닌 로컬 좌표 값으로 실제 Inspector 창에 뜨는 숫자를 그대로 가져올 수 있었다.
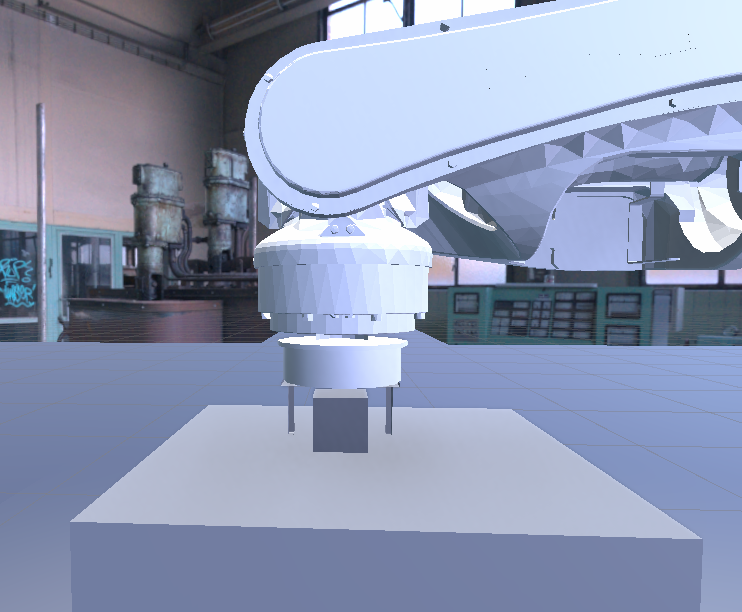
게임 화면에서는 이런 UI로 보여진다.

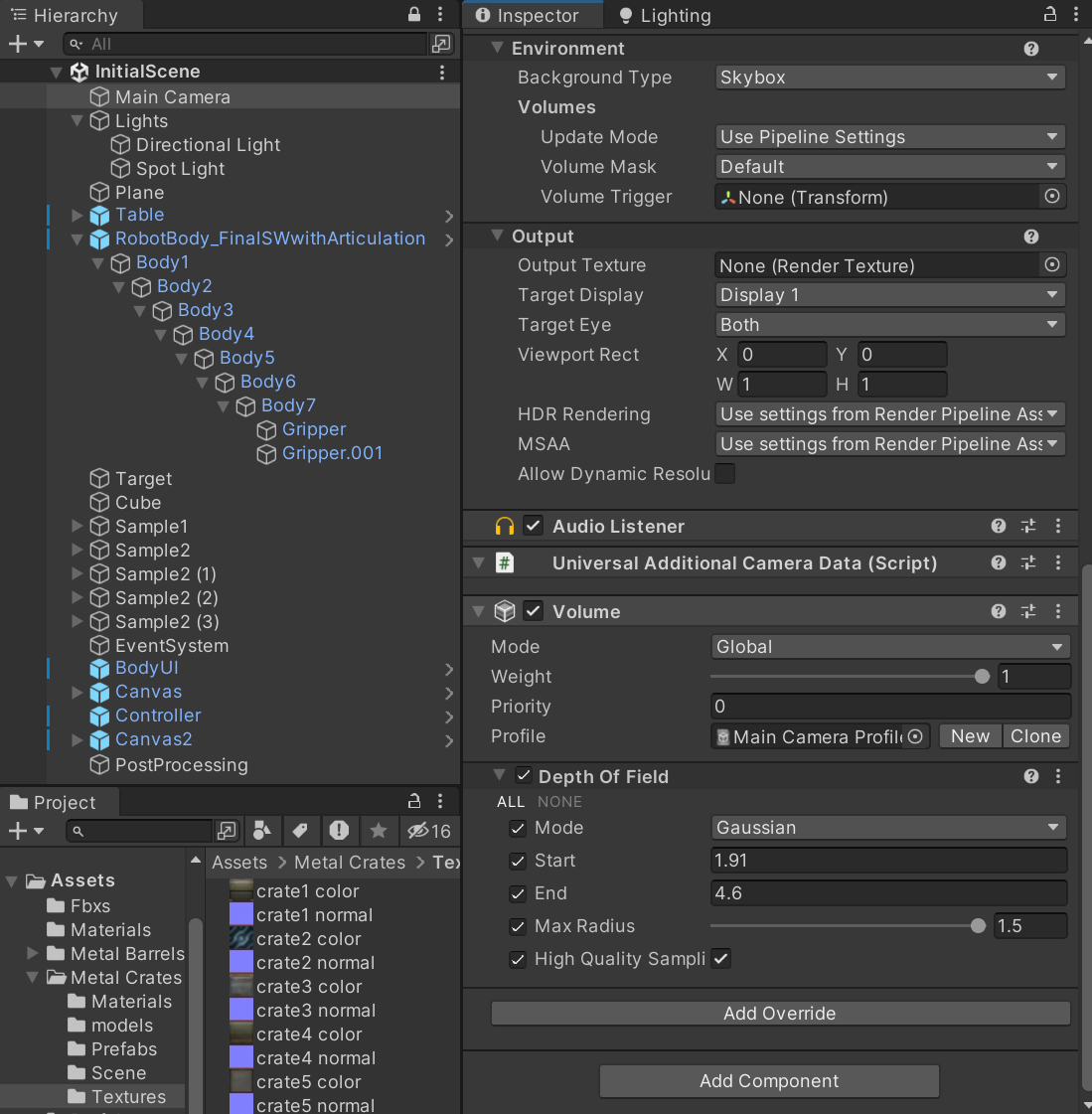
포스트 프로세싱 사용

카메라에 블러 효과 추가
예시 영상
728x90
반응형
'SKKU DT' 카테고리의 다른 글
| [SKKU DT] 29일차 -유니티(Unity)와 아두이노(Arduino) 연결하기 (2) | 2023.12.08 |
|---|---|
| [SKKU DT] 28일차 -유니티 네트워크(System.IO, JSON, Xml, CSV), API, 에셋 번들 (2) | 2023.12.07 |
| [SKKU DT] 26일차 -유니티 미니 프로젝트(로봇 팔 시뮬레이션) (1) | 2023.12.05 |
| [SKKU DT] 25일차 -유니티 C# 튜플, 인터페이스, 추상클래스, 프로퍼티, 레코드, 무명 형식, 배열 (1) | 2023.12.01 |
| [SKKU DT] 24일차 -유니티 C# 클래스 (생성자, this, static, 상속, 오버라이딩, 구조체) (1) | 2023.11.30 |



